von Peter DG5ACX und Hanno DH9RA
Es begab sich zu der Zeit als Peter und ich wieder von der unbeschränkten Ausübung unseres Hobbies träumten und ein Thema durch den Vorstand des H24 geisterte, die künftigen Mobilfuchsjagden interessanter zu gestalten. Mittels eines GPS Loggers sollte die gefahrene Route jedes Teilnehmer für ein späteres Debriefing genutzt werden. Der Gedanke, sich im Zeitraffer anschauen zu können, wie die Teilnehmer mehr oder weniger zielgerichtet ihre Peilarbeit verrichten schien ein verlockendes Ziel zu sein.
Was soll der Logger können?
1. Mittels GPS Uhrzeit, Position und Geschwindigkeit im Sekundentakt ermitteln.
2. Diese Daten auf eine SD-Karte im gpx-Format schreiben.
3. Jedes Gerät soll über eine eigene Identifikationsnummer verfügen.
4. Akkubetrieb für die Dauer einer Mobilfuchsjagd
5. Kompakte Bauweise zur Positionierung auf dem Armaturenbrett.
So fingen wir an, über mögliche technische Umsetzungen zu überlegen. Auf dem Markt gab es tatsächlich nichts Fertiges, was unsere Erwartungen an solch einen Logger erfüllte, also machten wir uns daran, das Produkt selbst ins Leben zu rufen.
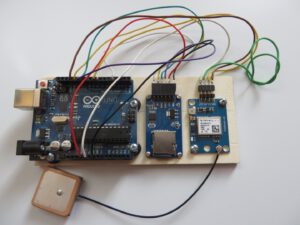
Im Grunde ist ja klar, was man braucht. Ein GPS-Modul, einen SD-Kartenleser, eine Stromversorgung und einen Mikrocontroller, der das Ganze orchestriert. Also fingen wir mit einem erstem Muster gemäß Abbildung 1 an.
Peter hatte die Komponenten in der Bastelkiste, so dass wir mit dieser Anordnung in die Softwareprogrammierung übergingen. Der verwendete Arduino Uno bot die notwendigen Schnittstellen SPI für den SD-Kartenleser und eine serielle Schnittstelle für das GPS-Modul. Für das Auslesen der GPS-Daten und das Schreiben auf die SD-Karte gab es fertige Bibliotheken, auch für die Aufbereitung im gpx-Format gab es alles Wichtige im Netz zu finden, so dass wir nach ein paar
Korrektur-schleifen schließlich erfolgreich GPS-Daten im Sekundentakt auf die SD-Karte schreiben konnten.
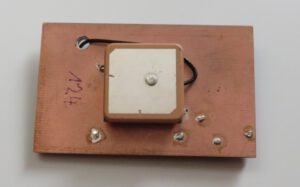
Die Einzelkomponenten wurden im weiteren Verlauf so arrangiert, dass sie in ein kompakteres Format für eine spätere Einhausung passten. Der klobige Arduino Uno wurde durch einen Arduino Nano ersetzt und es konnten alle drei Module platzsparend auf einer doppelseitig beschichteten FR4-Platine untergebracht werden. Es gibt mehrere Möglichkeiten, die Module anzuordnen. Der erste Versuch gemäß Abbildung 2, alle Module auf eine Seite der Platine zu bestücken stellte sich als unbrauchbar heraus, da der GPS-Empfang offenbar durch Störungen des benachbarten Arduino stark eingeschränkt war.

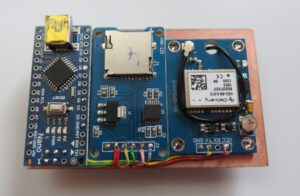
Eine wesentlich bessere Anordnung ergibt sich, wenn die Komponenten wie in Abbildung 3 angeordnet werden. Im Gegensatz zum ersten Versuch trohnt die GPS-Antenne nun allein auf der Rückseite der Platine und hat somit einen unver(stör-)nebelten Blick in den Himmel. Einige wenige Spannungsleitungen und Datenleitungen konnten platzsparend verlegt werden. Das GPS-Modul gibt seine Daten über eine serielle Schnittstelle an den Arduino, hierfür ist eine Leitung erforderlich. Das SD-Kartenmodul wird über SPI mit jeweils einer Leitung für die Datensignale MOSI, MISO und CS angesprochen.
Soweit so gut. Jetzt mussten wir das Teil aber auch mal testen. Damit das Gerät bei den Versuchen nicht zu empfindlich gegenüber der Umwelt ist, haben wir ihm noch ein kleines Mäntelchen im 3D Drucker gedruckt. Die Spannungsversorgung erfolgte erst einmal über eine Powerbank. Auf dem Armaturenbrett hat das Gerät einen guten Empfang und liefert nach der Auswertung die gefahrene Route gemäß Abbildung 4.

Das Gerät wurde eine Runde durch Wolfsburg bewegt, wie der rote Pfad offenbart, Geschwindigkeit und Höhe werden ebenfalls erfasst. Mehrere Routendaten könnten mit ihren zeitlichen Verläufen parallel angezeigt werden, so dass sich beim Mobilpeilen die ein oder andere amüsante Szene abzeichnet.
Der nächste Schritt befasst sich mit der Integration der Spannungs-versorgung und des Lademanagements. Eine Powerbank mit einer 18650 Lithium-Ionen Zelle schien uns die richtige Lösung zu sein, da sie wie in Abbildung 5 an die Seite der Platine passte. Diese Lösung war preislich attraktiver als der Einzelkauf von Batteriezelle und einer Platine mit USB-Lademimik. Die kleine Platine mit dem Laderegler nahm am Rand der Platine Platz. Die GPS Antenne wich an den anderen Rand aus, um Störungen zu vermeiden. Das Endmaß der Platine beträgt nun 45 mm x 72 mm.


Alle Komponenten fanden ihren Weg in ein 3D gedrucktes Gehäuse aus PETG, diesmal mit angeflanschtem Batteriefach. Die Gehäusemaße betragen 68 mm x 75 mm x 24 mm. Das Gerät bekam noch einen passenden Deckel und bildet nun die Vorlage für weitere Geräte. Über die USB-Buchse des Ladereglers kann das Gerät aufgeladen werden. Weiterhin dient die USB-Schnittstelle des Arduino Nano als Debug-/ und Programmierschnittstelle.

Wir sind mit dem Ergebnis zufrieden. Sicher stellt man sich die Frage, ob nicht eine eigene Platine, die sämtliche Funktionen integriert nicht noch besser gewesen wäre. Die Rückgriff auf fertige Module hat jedoch die Entwicklung beschleunigt und unterm Strich ist die Bauform immer noch recht kompakt geworden und dem Einsatzzweck angemessen. Für andere Einsatzzwecke wie Modellbau etc. sind die Randbedingungen hinsichtlich Gewicht und Größe sicher nochmal schärfer.
Man denke an die Elektronik, wie sie in den ferngesteuerten Drohnen oder Smartphones verbaut ist. Da uns dieses Projekt viel Spaß gemacht hat werden wir uns nun der weiteren Miniaturisierung widmen, in dem wir eine eigene Platine entwickeln, die alle Komponenten auf engstem Raum zusammenbringt. Einen kleinen Ausblick darauf geben Abbildung 6 und 7.


Das SD-Modul dient hier beispielhaft als die Platine, die später noch den Mikrocontroller und das GPS-Modul enthalten wird. Das abgebildete GPS-Modul ist nochmals kleiner als in der aktuellen Version, letztlich wird die Batterie das begrenzende Glied der Miniaturisierung sein. Falls ihr euch als Modellbauer oder sonstiger Anwender für diesen kleinen GPS Tracker interessiert, könnt ihr euch gerne an uns wenden.