In Vorbereitung auf das ARISS Projekt des H24 (bin Optimist), habe ich mich mit Amateurfunksatelliten beschäftigt. Die meisten Amateurfunksatelliten sind “LEOs”, die in niedriger Entfernung (Low Earth Orbit) die Erde mit hoher Geschwindigkeit umkreisen.
Das Problem für uns Funkamateure ist, dass sich die Frequenz wegen der hohen Geschwindigkeit ständig ändert. Das hat schon jeder erlebt: Die Sirene eines auf uns zukommenden Feuerwehrautos hat einen höheren Ton (Frequenz), als ein von uns Wegfahrendes.
Das nennt man den “Doppler Effekt”.
Bei der Raumstation ISS, die in ca. 400 km über der Erde mit ca. 7.674 m/sec. !!! Ja, pro Sekunde!, fliegt, verhält sich das genauso. Im 70 cm Band sind das locker 5 kHz. Stellt euch mal vor, Ihr liegt bei einem QSO 5 kHz daneben 🙂
Natürlich gibt es jede Menge Programme, die die abweichende Frequenz berechnen und und per CAT-Steuerung den Transceiver auf die richtige Frequenz einstellen.
Das bekannteste ist SatPC32 von DK1TB, aber ich möchte heute ein anderes, unter verschiedenen Betriebssystemen (Mac, Linux, Windows) laufendes, Programm vorstellen: GPREDICT.
Ich bleibe heute bei Windows.
GPREDICT ist ein Echtzeit-Satelliten-Verfolgungsprogramm mit der Möglichkeit der Vorhersage über dem eigenen Standort, CAT- und Rotorsteuerung für die meisten Transceiver / Rotoren.
GPREDICT ist Freeware und steht unter der GNU General Public License.
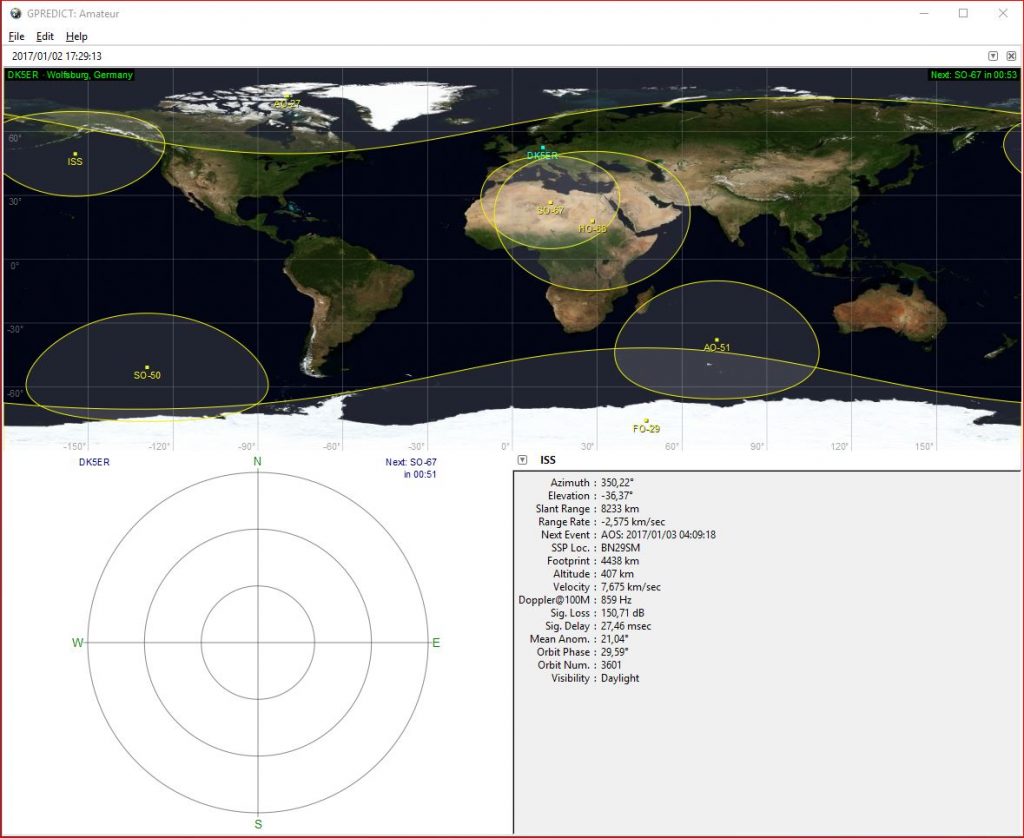
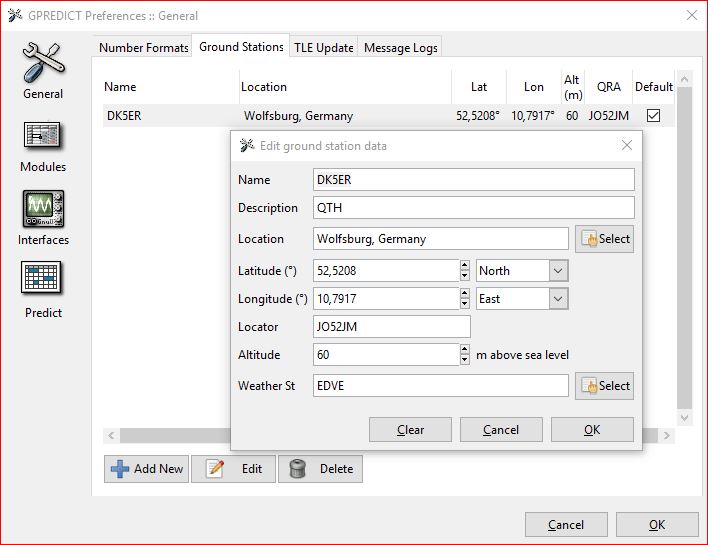
Nachdem die Grunddaten (General, Ground Stations) eingestellt sind, kann man bereits die Satelliten beobachten.
Spielt etwas mit dem Programm herum, das Meiste ist selbsterklärend und ich möchte euch nicht langweilen.
Jetzt kommt der Haken, der mich einige Stunden Lebenszeit gekostet hat, die ich Euch gerne schenken möchte:
Die Einrichtung der CAT Steuerung des Transceivers.
Das Programm GPREDICT arbeitet mit dem universalen DAEMON “rigctl” von HAMLIB (Ham Radio Control Libraries) zusammen. (Hamlib Wiki).
Ein DAEMON ist ein “Diener”, ein “dienbarer Geist” oder bei Windows einfach “Dienst” genannt.
Hamlibs stellt also einen Dienst zur Verfügung, der im Hintergrund läuft und die CAT-Steuerung eines beliebigen Tranceivers bereitstellt.
Auch Hamlibs ist Freeware unter der GNU Licence.
Nach dem herunterladen und installieren von Hamlibs öffnen wir das Verzeichnis:
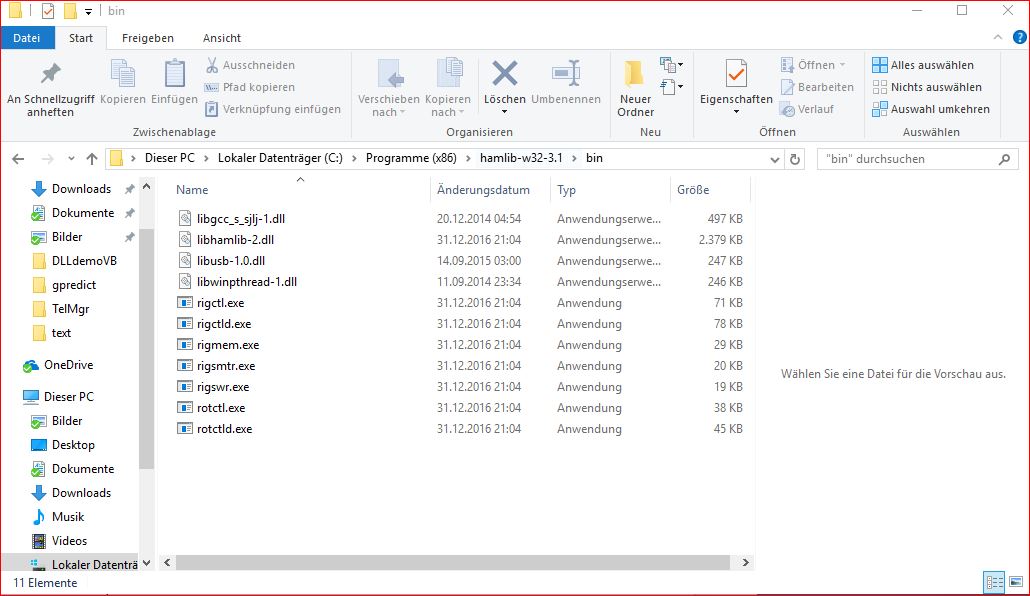
Uns interessieren 4 Programme (CMD aufrufen! Es sind Kommandozeilenprogramme!):
rigctl.exe – die universelle CAT-Steuerung für beinahe jeden TRX
rotctl.exe – die universelle Rotorsteuerung
und die beiden DEAMONS:
rigctld.exe und rotctld.exe
Während die beiden Programme rigctl und rotctl direkte Steuerungen der Tranceiver / Rotoren sind, sind die Pendanten mit dem “d” am Ende die Dienste, die im Hintergrund laufen und einen TCP/IP Port öffnen.
Zum direkten Testen und Steuern unserer Geräte nehmen wir also rigctl.exe und rotctl.exe, zum Bedienen über andere Programme die rigctld.exe und rotctld.exe.
Soviel zur Theorie über die Programme.
Mit diesem Hintergrundwissen sind wir soweit, unser Radio in GPREDICT einzustellen.
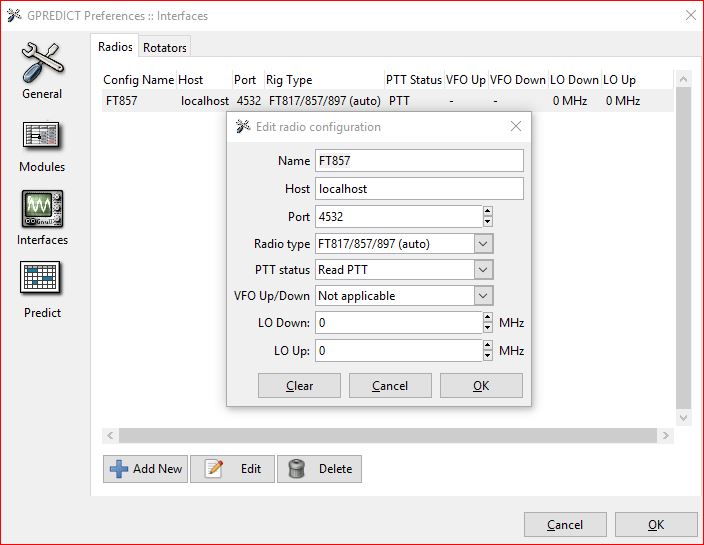
Name ist ein frei wählbarer Name. Localhost ist unser PC (so lassen), der TCPIP Port 4532 ist der TRX Standard Port für rigctld.
Ich habe einen FT-857D, den ich steuern möchte. Achtung, den FT-857D in den Split-Mode versetzen, da GPREDICT beide Speicher des FT-857D aktualisiert, den VFO-a und VFO-b. (RX + TX).
Wir öffnen das CMD Fenster (Start -> CMD) und gehen in das Hamlibverzeichnis (cd C:\Program Files (x86)\hamlib-w32-3.1\bin).
Das kann natürlich bei jedem anders sein.
Mit “dir” rufen wir den Verzeichnisinhalt auf.
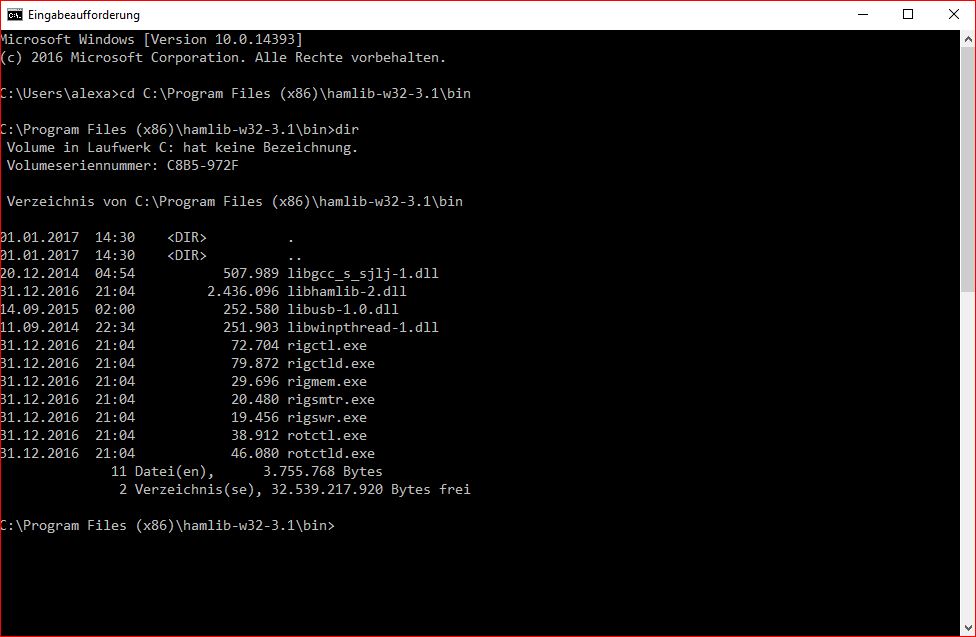
Hier sehen wir die Programme, die wir benötigen.
Ich gehe davon aus, dass jeder weiß, an welchem COM-Port und mit welcher Geschwindigkeit (Baud) sein TRX am PC angeschlossen ist.
Bei mir ist es der COM-Port 7 (COM7) mit 38400 Baud (Menü 19 beim FT-857D).
Wir rufen das Programm rigctl.exe auf und bekommen ein Prompt zurück:
Rig command:
Wir geben “?” ein und bekommen die Befehlsliste zurück:
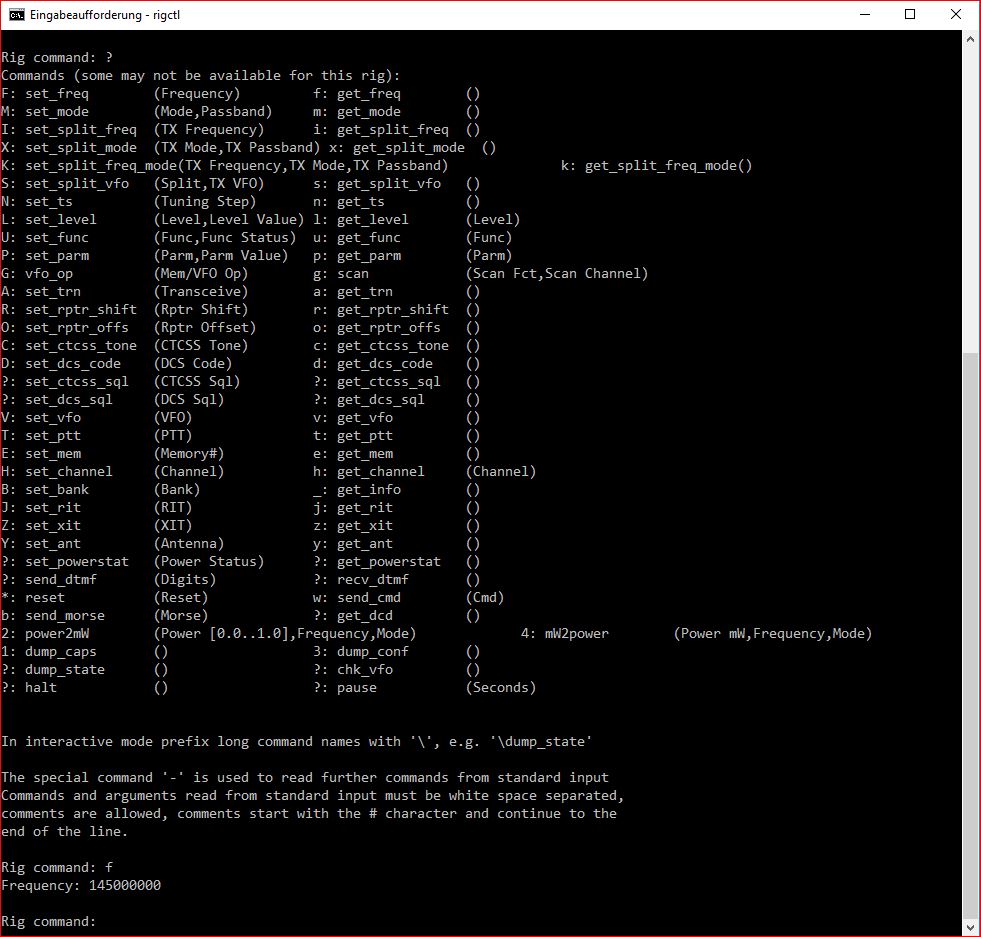
mit “f” rufen wir die Frequenz des TRX ab.
Es kommt 145… natürlich falsch. Das Programm ist ja noch gar nicht mit unserem TRX verbunden!
Also nochmal:
mit CTRL + C Programm beenden.
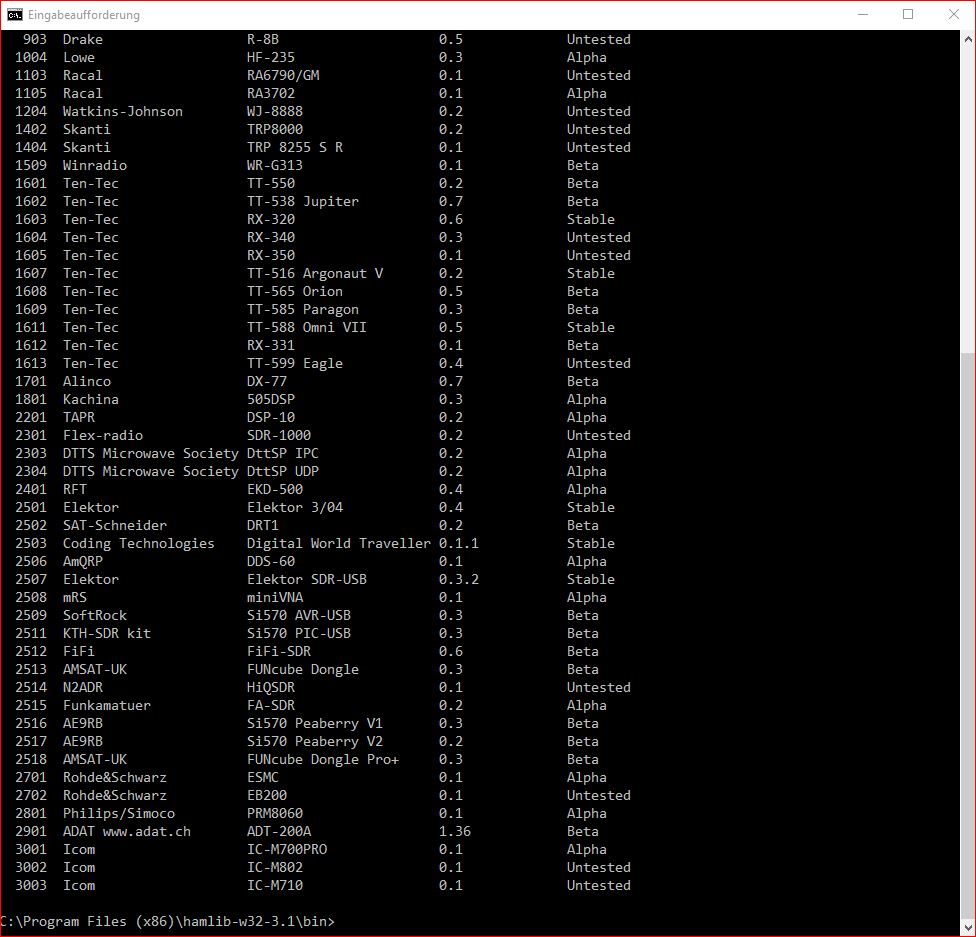
rigctl.exe – – l (2 Mal-)
Es kommt eine Liste mit Geräten. Wir suchen unseres aus und merken uns die ID. Bei meinem FT-857D ist es die 122.
Ich überspringe etwas, hier die komplette Anleitung für Interessierte:
Der Befehl für die Auswahl des Gerätes ist -m, für den COM Port -r, für die Baudrate -s.
Die Syntax für mein Gerät also:
rigctl.exe -m 122 -r COM7 -s 38400
Wenn alles geklappt hat, können wir jetzt mit “f” die Frequenz unseres TRX auslesen.
Funktioniert? Wunderbar! Bitte mit CTRL + C das Programm schließen.
Für GPREDICT benötigen wir den DAEMON.
Also im CMD die gleiche Syntax eingeben,
“C:\Program Files (x86)\hamlib-w32-3.1\bin\rigctld.exe” -m 122 -r COM7 -s 38400 -t 4532
mit dem Unterschied, dass -t 4532 hinzukommt, dass ist der TCPIP Port, den der DEAMON zur Verfügung stellt und auf den GPREDICT lauscht.
Das CMD-Fenster bleibt geöffnet. Wer sich die Arbeit ersparen will, macht eine Batch (.bat) Datei.
Wenn alles geklappt hat, starten wir den “rigctld” Dienst, danach GPREDICT.
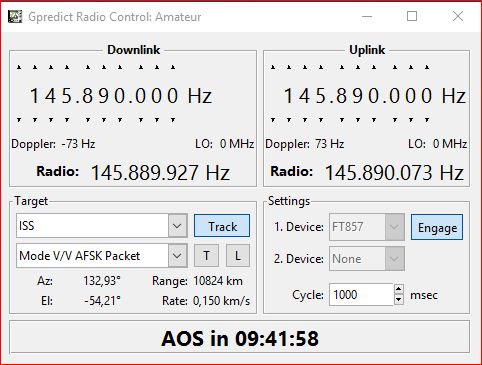
Wir gehen in das sehr gut versteckte Menü “Radio Control”:
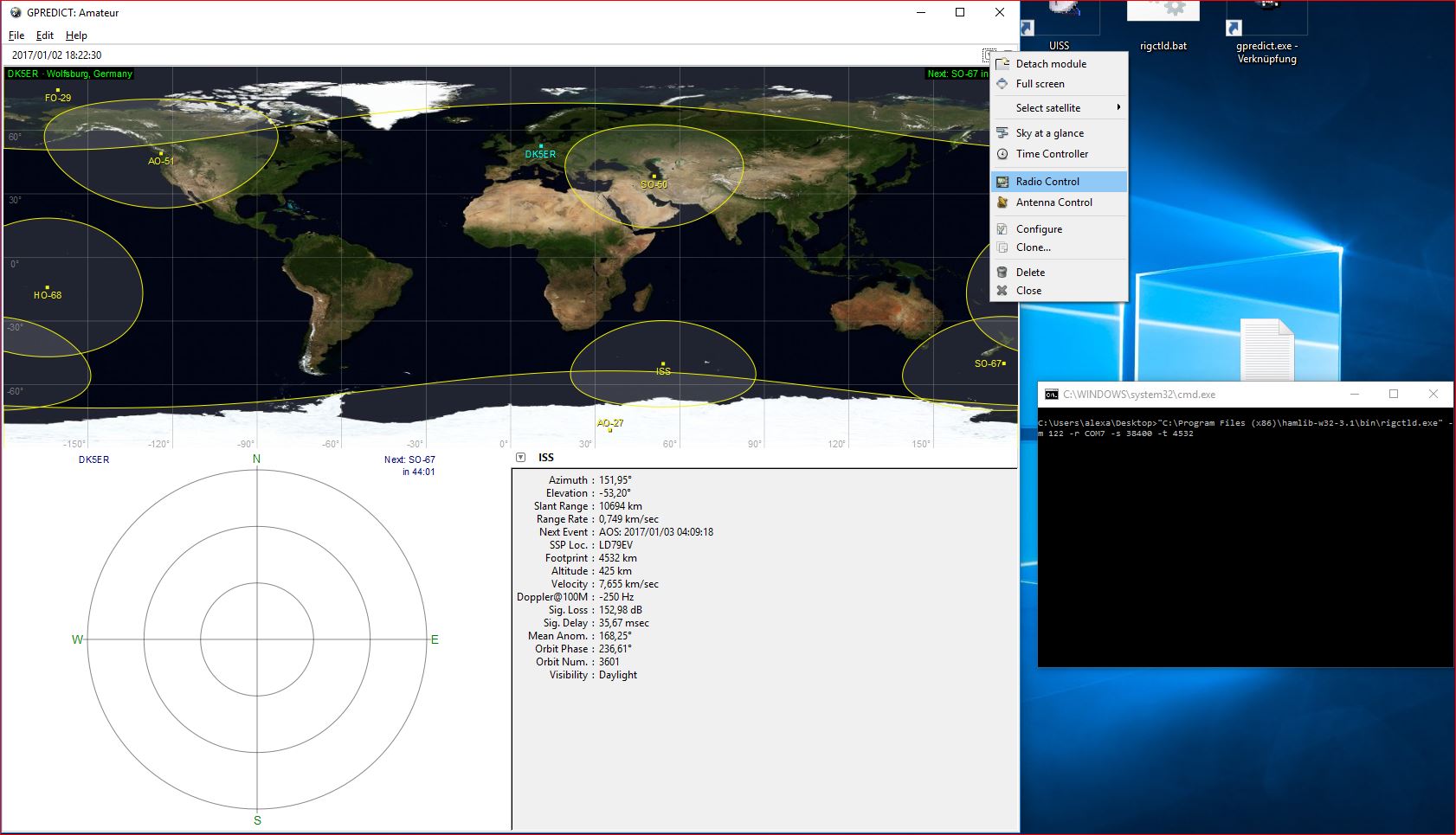
Mit “Engage” und “Track” steuert jetzt GPREDICT über rigctld unseren Tranceiver immer auf die richtige Frequenz, unter Berechnung des Dopplereffekts.
In Teil 2 beschäftige ich mich mit APRS über die ISS mit Hilfe des Programmes UISS von ON6MU.
73 Alexander, DK5ER
Danke Alex und congrats, dass Du es in kurzer Zeit geschafft hast, das Programm an Deinen TRX anzupassen. Ich bin auf den zweiten Teil und die Rotorsteuerung gespannt!
Schöner Beitrag, vielen dank für den Hinweis im Amateurfunk-Forum.
Ich vergaß zu erwähnen, der FT-857D (und natürlich die 817 und 897) sollten im Split-Mode sein. GPREDICT aktualisiert ständig die VFO-a mit der RX-Frequenz und regelmäßig (einstellbar) die TX Frequenz im VFO-b. Bei “echten” Dualbandern natürlich gleichzeitig.
Genau das hab ich gesucht! Vielen Dank für die Vorarbeit.
Vielen Dank für diese tolle Dokumentation. Ich werde das die Tage für meinen FT-991 probieren. Leider erscheint der nicht in der Liste. Versuche es mit dem FT-897
FT-991 = 1035
https://github.com/Hamlib/Hamlib/wiki/Supported-Radios
Toller Beitrag!
Das waren genau die Infos, die ich gesucht habe, um auch den RSP2 mit SDRuno an gpredict anzubinden.
Das dabei, “so nebenbei”, auch noch die Config für mein 857d mit rauskam, ist natürlich der Hit.
Besten Dank, 73 DL9LC Lena
Endlich hab ich mit GPREDICT ein Programm gefunden das ich mit meiner Station verbinden kann.
Danke für Deine ausführliche Anleitung.
Bin gespannt ob es mit der Rotorsteuerung auch klappt.
Besten Dank, 73 HB9BXB Ruedi
Hallo, hier Erich HB9FIH zZt in SV8 Samos muss warten bis Wind von Süd kommt.
Will nun endlich auf SAT einsteigen.
Habe LinuxMint 20.3, Gpredict installiert, Hamlib etc. mit FT-857 hier Nachher im Home QTH dann FT-818 und FT-991.
Alles sieht ordentlich aus mit dem FT-857, nur (ja eben)
Wenn ich bei der Funkgeräte Steuerung auf starten klicke dann führt es die QRG’s nach – der Button bleibt aber nicht gedrückt, wird nach ca 2 Sek wieder inaktiv. Der Nachführen Button bleibt aktiv.
Der deamon läuft (? müsste) sehe keine Meldungen in der Konsole (mit -vvvvv gestartet)
und die QRG’s im Radio werden nicht aktualisiert.
Das was auf der Konsole eingegeben wurde und rauskam.
Eventuell hat jemand eine Idee, insbesondere da ich hier auch vom FT-857 las.
Danke Erich
Hurra der HB9FIH ist nochmals da…
Es läuft – es war der deamon – rigctld — das d wurde ausgelassen.
Super Anleitung congrats – Danke
Es freut mich, dass es geklappt hat.
73, Alexander